国際航業、筑波大学、九州大学等と共同で「自然災害対応ロボットシステム」の公開実証実験を実施
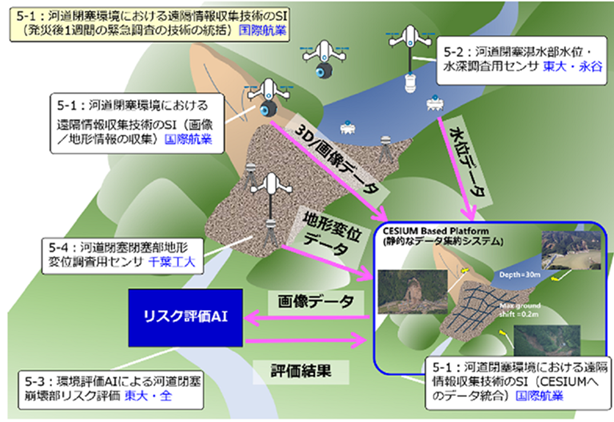
国際航業は、この度、内閣府・科学技術振興機構が推進するムーンショット型研究開発事業・目標3「自ら学習・行動し人と共生するAIロボット」プロジェクトの一環として、筑波大学 システム情報系 永谷圭司教授がプロジェクトマネージャーを務める「多様な環境に適応しインフラ構築を革新する協働AI ロボット(Collaborative AI Field robot Everywhere、CAFEプロジェクト)」が実施する、河道閉塞対応ロボットシステムの公開実証実験に参画しますと発表した。
〈公開実証実験〉
日時:2025年7⽉10⽇(⽔)13:00〜16:00(12時30分受付開始)
場所:九州⼤学伊都キャンパス内 実験フィールド(九州⼤学 伊都キャンパス)
本実証実験は、大雨や地震の後に発生する崖崩れによる河道閉塞に対し、これまでの人力に頼っていた危険な災害対応を、ドローンや小型建設ロボット群によって実現するものです。河道閉塞が決壊すると重大な災害につながる恐れがあるため、今回のロボットシステムは、二次災害の危険を伴う過酷な現場での応急復旧作業を、より迅速かつ安全に進めることを目指します。
この記事を書いた記者
-
営業部所属
主に企画、広告営業、WEBを担当。
40代から始めたゴルフが、今は一番の趣味。
千葉・栃木方面のコースがお気に入り。
最新の投稿
 レポート2026.03.13シャープ、新製品「ヘアアイロン」を発表
レポート2026.03.13シャープ、新製品「ヘアアイロン」を発表 プレスリリース2026.03.13古野電気、「WIND EXPO春 第17回 国際風力発電展」へ出展
プレスリリース2026.03.13古野電気、「WIND EXPO春 第17回 国際風力発電展」へ出展 プレスリリース2026.03.13NTTテクノクロス、「2026 J-Winダイバーシティ・アワード」ベーシック部門 大賞を受賞
プレスリリース2026.03.13NTTテクノクロス、「2026 J-Winダイバーシティ・アワード」ベーシック部門 大賞を受賞 プレスリリース2026.03.13国際航業、GCエナジーのソーラーカーポート提案を支援
プレスリリース2026.03.13国際航業、GCエナジーのソーラーカーポート提案を支援