PTC、NVIDIAと協業し、OnshapeとNVIDIA Isaac Simの接続により設計とロボティクスシミュレーションを統合
米 PTCは、PTCのクラウドネイティブなコンピュータ支援設計(CAD)および製品データ管理(PDM)プラットフォームOnshape®と、NVIDIAのオープンシミュレーションフレームワークNVIDIA Isaac Simを接続する、ロボティクス向け設計からシミュレーションまでのワークフローを発表した。この新ワークフローは、NVIDIA GTC 2026で紹介され、単一の信頼できるデータソース(Single Source of Truth)を維持しながらロボット設計をシミュレーションすることができるとしている。これにより、時間短縮、エラー削減、開発の加速が可能となり、さらにNVIDIA Isaac Labにおける下流のロボットトレーニングを通じて、フィジカルAIの実現を支援する。
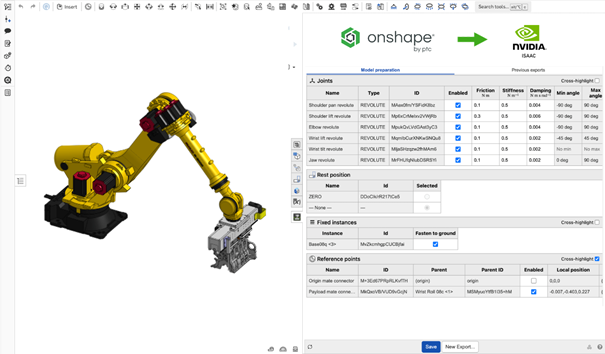
ロボット設計では継続的な反復作業が不可欠であり、エンジニアは機械設計を更新し、その変更をシミュレーション上で検証する必要がある。従来の多くのワークフローでは、この設計からシミュレーションへの引き渡しが手作業かつ時間を要するもので、CADモデルをエクスポートした後に、ジョイントやアクチュエータなどの物理的要素を再作成する必要があった。OnshapeとIsaac Simを連携させたワークフローでは、Onshape上で一度定義した機械的な関係性を、そのままIsaac Simに引き継ぐことが可能。設計が変更されるとシミュレーションも自動的に更新され、FANUC America Corporationのような企業が、CADから物理ベースのシミュレーションへより迅速に移行できるように支援する。
FANUC America Corporation オートメーションシステムグループ ゼネラルマネージャー Amar Dhaliwal氏のコメント
「OnshapeとNVIDIA Isaac Simの統合により、産業用ロボットシステムの設計および評価プロセスに、より早い段階からシミュレーションを取り入れることが可能になります。この早期の課題認識によって、より適切な設計判断、迅速な統合、そして円滑なプロジェクト遂行が可能となり、お客様は自動化への投資から最大限の成果を得ることができます。」
PTCのOnshapeおよびArenaのEVP兼ゼネラルマネージャーDavid Katzman氏のコメント
「ロボティクスチームには、アイデアが高速で変化する状況に対応できるワークフローが求められています。NVIDIAとの協業により、継続的かつコラボレーティブな設計におけるOnshapeの強みと、世界最高水準のシミュレーション技術を組み合わせ、ロボティクスエンジニアリングの未来を支えるフィジカルAIの基盤構築を支援します。」
NVIDIAのOmniverseおよびシミュレーション技術担当バイスプレジデントRev Lebaredian氏のコメント
「ロボティクス開発は、設計と物理的に正確なシミュレーションの間にある継続的なフィードバックループに依存しています。PTCのクラウドネイティブなOnshapeプラットフォームをNVIDIA Isaac Simに接続することで、さまざまな設計変更が瞬時にシミュレーションへ反映され、迅速な反復とインテリジェントマシンの開発スケールを可能にします。」
この連携は、Amazon Web Services(AWS)上に構築されたクラウドネイティブアーキテクチャによって実現しており、開発プロセス全体を通じて設計とシミュレーションの同期を維持している。その結果、エンジニア、研究者、AI開発者は、シミュレーション用モデルの準備作業ではなく、挙動の検証や性能向上に集中することができる。
OnshapeとIsaac Simのワークフローは、2026年3月16日から19日まで米国カリフォルニア州サンノゼで開催したNVIDIA GTCにて紹介された。会期中には、追加の技術セッション、パートナーコンテンツ、顧客事例も提供された。
PTCは、Onshapeをはじめとする製品ポートフォリオを通じて、インテリジェント製品ライフサイクル(IPL)というビジョンを実現している。これにより、製造業や製品企業は製品データの基盤を構築し、その価値を企業全体へと拡張し、AIを活用した変革を加速することができ、製品データを幅広く活用することで、企業は高品質な製品をより迅速に市場投入できるだけでなく、製品の複雑性を適切に管理し、規制やコンプライアンス要件に対応可能になるなど、さまざまな課題に対応できるとしている。
この記事を書いた記者
-
営業企画部
営業記者 兼 Web担当
新しいもの好き。
千葉ロッテマリーンズの応援に熱を注ぐ。



